Touch is an essential sense that governs our interaction with the world. For humans and animals alike, it offers a complex tapestry of information, from texture to temperature, forming the basis of how we explore our environment. In robotics, however, replicating this nuanced sensory input has been a long-standing challenge. Robots often operate in isolation, lacking the intricate feedback mechanisms that living beings utilize daily. Recent advancements at the German Aerospace Center’s Institute of Robotics and Mechatronics promise to shift this paradigm, using a remarkable fusion of traditional sensors and cutting-edge machine learning to create a more sophisticated method for robots to perceive touch.
Breaking Free from Conventional Methods with Innovative Technologies
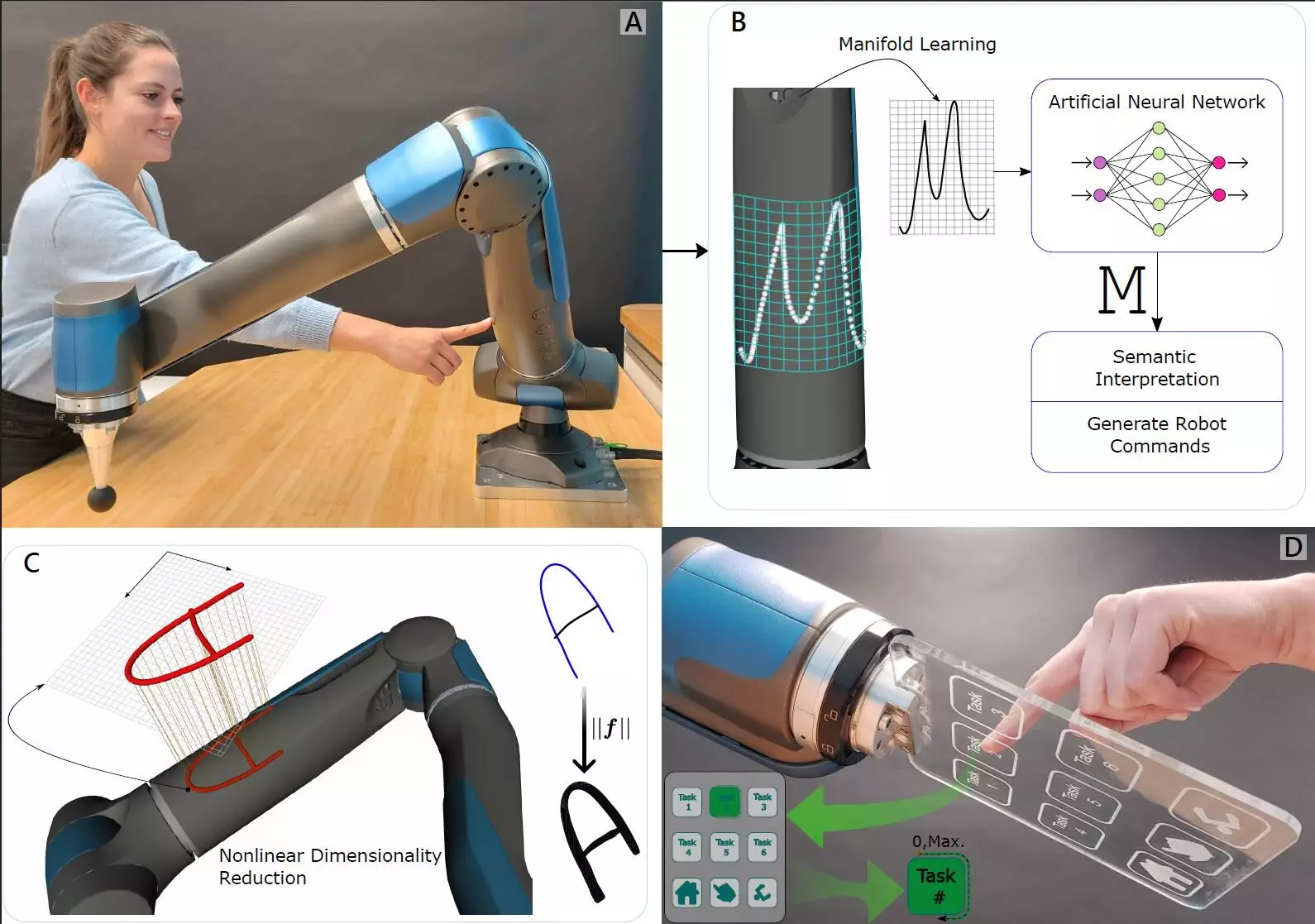
Historically, robotic touch perception relied heavily on artificial skin or superficial sensors that struggled with complexity. The new study, published in the journal Science Robotics, takes a groundbreaking route by utilizing internal force-torque sensors integrated into the robot’s joints. This innovative configuration allows the robot not just to sense contact but to gauge the intricate forces and torques applied from various angles. By focusing on pressure as felt through the robot’s own structure, the research team has crafted a sensing system that is both ingenious and radically different from existing methods.
Deep Learning: Empowering Robots to Understand Touch
The introduction of machine learning into the mix amplifies the sensory capabilities of these robotic systems. By training algorithms to interpret the data gathered from the force-torque sensors, robots can learn to distinguish between different types of tactile interactions. Imagine a robot that can recognize not only when it’s being touched but also comprehend where and how. This level of touch discrimination is groundbreaking; it has the potential to enhance collaboration between robots and humans, particularly in industrial settings where precision and responsiveness are paramount.
Applications and Implications for Human-Robot Interaction
By eschewing artificial skin, this novel approach also reduces complexity and cost. The implications for human-robot interactions are profound. For example, robots could operate alongside humans without needing cumbersome protective coverings, allowing for more intuitive and direct cooperation. Picture a manufacturing floor where robots seamlessly assist human workers, adapting their actions based on real-time feedback from tactile interactions—this is a significant leap toward smarter, safer working environments.
The Future of Haptic Feedback in Robotics
As the field of robotics evolves, the enhancement of tactile perception could lead to broader applications that transcend traditional industrial roles. From healthcare settings, where robots may assist in compassionate care, to service industries that require delicate interaction, the opportunities for this technology are vast. Achieving a more advanced sense of touch in robots opens up an entirely new chapter in robotics, one where these machines will not merely serve as tools but partners capable of sophisticated interactions and richer engagements with human operators.
Embracing these innovative technologies will undoubtedly redefine the expectations of what robots can achieve, reflecting an exhilarating future where touch-sensitive robots play vital roles in our daily lives.